Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта

Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер : маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450 золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550 и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.

Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.

Настало время выяснить,что же такое
квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
Курсовая камера
Передатчик
OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой
уже определились. 450 масштаб, клон TBS.
2) Приёмник/Передатчик.
Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов
Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например
видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 - характеристики пропеллера(11-дюймы, 4.7 шаг)
3S - число банок LiPo батареи
12А - сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание
: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv - при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал
И пропеллеры
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой(+\-) - красный
5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh - ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на ""клеверы""
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
Появился её конкурент, тоже имеющий AV выход
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой:
Естественно сама бортовая камера
Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо
за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства. Планирую купить +99 Добавить в избранное Обзор понравился +62 +150
Как я уже писал, довольно много деталей я заказал ещё два года назад, и они у меня остались - моторы, контроллеры, пропеллеры. Теперь же мы захотели сделать всё на новом уровне, используя покупную раму - она более прочная и красивая чем самодельная, тем более стоит всего 300 рублей. Заодно закажем пару дополнительных штук: понадобится новый аккумулятор, провода в силиконовой изоляции и новый пульт радиоуправления.
Детали квадрокоптера
Для постройки квадрокоптера вам понадобятся:
- Рама . Это его корпус, основание на котором вы разместите управляющую электронику (и аккумулятор) в центре, и моторы с пропеллерами - на концах лучей.
- Аккумулятор . Даёт энергию для работы моторов, но имеет большой вес. Здесь нужно найти компромисс: большой аккумулятор с одной стороны запасает больше энергии и увеличивает время полёта, а с другой стороны добавляет вес и уменьшает полётное время.
- Моторы . Крутят пропеллеры, очень много зависит от их мощности и скорости вращения. Маленькая скорость больше подходит для больших коптеров с большими пропеллерами. Высокая скорость, соответственно, наоборот - для микрокоптеров и паркфлаеров.
- Пропеллеры . Создают подъёмную силу. Имеют много разновидностей, но для коптеров применяют «электрические» пропеллеры (т.е. для электромоторов).
- Крепления пропеллеров . Удобные штуковины, крепящиеся на ось мотора и имеющие резинки, чтобы держать пропеллер. Резинка служит «слабым местом», которое порвётся при аварии коптера, и убережёт пропеллеры и мотор от поломки.
- Регуляторы , или ESC . Создают питание для моторов (а именно - бегущее магнитное поле) и управляют их скоростью. Наиболее важен их максимальный ток - нужно прикинуть по току моторов, и взять с запасом в 20-30%.
- Пульт управления . У вас в руках находится пульт с органами управления и передатчиком, на коптере стоит приёмник. Существуют варианты на 40 МГц и на 2.4 ГГц, ещё один параметр - расположение ручек управления, остальное не так важно.
- Провода . Важная штука, потому что токи большие, и провода должны иметь значительную толщину и в тоже время быть довольно гибкими (для удобства).
- Зарядное устройство . Про него иногда забывают, но без него зарядить батарею практически невозможно - не недо- или перезарядить, держать безопасный ток, контролировать заряд и температуру. Конечно, лабораторный блок питания всё это умеет (и я писал про заряд сдохшего литий-ионного аккумулятора именно от такого блока), но он не может заряжать сразу несколько ячеек, а значит процесс заряда растянется в 3 раза - да и неудобно с ним.
Это всё, что нам нужно в магазине, т.к. плату управления мы делаем сами.
Поиск и сравнение деталей
Но как выбрать, к примеру, аккумуляторы или моторы из большого ассортимента в магазине hobbyking.com? На помощь приходят два сайта: http://rcdetails.info/ и http://parkflyer.ru/. Паркфлаер начинал как простой оформлятор заказов на hobbyking с русским интерфейсом и приёмом платежей по webmoney - но со временем оброс обширной базой отзывов к товарам, онлайн-консультациями и форумом: вам вполне могут помочь подобрать всё железо для квадрокоптера. Настоятельно рекомендую ознакомиться там с отзывами на интересующие детали.
Подбор параметров
Довольно тяжело сказать «возьми такие-то моторы и такие-то пропеллеры, и получится отличный коптер» - просто потому что у всех разные цели и средства, кто-то хочет просто полетать - а кто-то собирается вешать килограммовую камеру и снимать ей окрестности.
По моему мнению, для коптера «просто полетать» подходит такая конфигурация:
- 4 винта (т.е. квадрокоптер)
- пропеллеры 8*4.5-10*5
- моторы мощностью 150-200 Вт и средним Kv- т.е. примерно 1000-1500
- аккумулятор 3S ёмкостью 1.5-3 Ач
Это из основного. Дополнительно - провода, разъёмы и прочая мелочевка, которая тем не менее увеличивает удобство монтажа и ремонта, а когда-то и замены деталей.
Варианты
Если вам нужен тяжелый мощный коптер для съёмки - нужно взять 6 или 8 лучей, поднять суммарную мощность моторов до 2-3 кВт (имеет смысл уменьшить Kv до 500), и конечно использовать батарею не меньше 3S 5 Ач, лучше даже увеличить количество ячеек до 4 - а то и взять две батареи. Понятно, что также потребуется сервоподвес для камеры, но это уже application-specific тонкости.
Для нанокоптера можно остановиться на 3 или 4 лучах, мощность моторов снизить до суммарных 250 Вт, увеличить Kv до 3000 или больше, взять батарею 2S ёмкостью 500 мАч и летать только в помещении - лёгкие коптеры очень плохо справляются с ветром. Однако, у них всегда получается огромная тяговооружённость, что является прикольным плюсом
Покупка деталей
Выбрали все детали - теперь их нужно купить. Покупать в Москве очень дорого, я хожу в московские хобби-магазины только за мелкими расходниками вроде разъёмов, или когда нужно что-то срочно купить. Даже когда сроки поджимают, всё равно заказ в Китае с быстрой доставкой получается дешевле.
Поэтому, я советую покупать детали для квадрокоптера на Hobbyking.com. Это дёшево и надёжно, правда не очень быстро.
**Статьи цикла:
** 1. Начинаем проект квадрокоптера
- Выбор деталей
- Заказ деталей на Hobbyking.com
- Управление положением квадрокоптера
- Получение данных с MEMS-акселерометра
- Калибровка и обработка сигнала MEMS-акселерометра
При создании коптера одним из важнейших параметров является время автономного полёта. Если вы хотите, что бы ваш коптер летал как можно дольше, моторы и их несущие винты должны работать в оптимальном режиме с максимальным КПД. Для решения данной задачи нами был спроектирован специальный измерительный стенд, речь о котором и пойдет в данной статье.
Мы занимаемся созданием бесколлекторных моторов и недавно у нас был заказ на мотор для квадрокоптера с тягой не менее 2 Кг на каждый винт. До этого мы не делали моторы под воздушный винт и нам был необходим метод измерения и стенд для мотора с винтом.
Прежде чем начать выбирать оптимальный мотор и винт под него, сперва нужно разобраться какие потери возникают в моторах.
Основными источниками потерь в бесколлекторных моторах являются железо статора и его обмотка.
Потери на железе возникают из-за его перемагничивания. Данные потери условно можно считать пропорциональными оборотам мотора и они задают минимальную потребляемую энергию мотора. Так, например, если вы возьмете большой и мощный мотор для маленького коптера с маленьким винтом, то ничего хорошего у вас не получится. Мотор просто будет вращаться вхолостую с нулевым КПД и греть железо в статоре.
Потери в медной проволоке наоборот не зависят от оборотов, а зависят от тока/потребляемой мощности. Данные потери ограничивают максимальную мощность, которую способен выдать мотор не перегревшись.
Вторым важным элементом при выборе мотора является винт. Малые винты обладают более низкими показателями эффективности г/Вт(1 грамм подъёмной силы/1 Ватт потребляемой мощности), но маленькие винты более динамичны и позволяют быстро набрать скорость на гоночных коптерах. Для достижения максимального времени полёта винт должен соответствовать максимально эффективному режиму работы мотора.
Однако если мы захотим подобрать оптимальные комплектующие для своего коптера, то мы столкнемся с большой проблемой при их выборе. Производители дают минимальный набор характеристик для своего товара. По винтам вообще невозможно найти какой либо информации кроме их размера.
Функционал стенда
На данный момент несколько производителей уже представили на рынок свои стенды. Однако их возможности не сильно превосходит функционал кухонных весов. И данные стенды не способны дать всех характеристик при работе мотора.
Нам же от стенда были необходимы следующие параметры: потребляемая мощность, обороты мотора, тяга винта, момент создаваемый винтом, КПД мотора, эффективность мотора, винта.
Исходя из этих параметров мы спроектировали конструкцию стенда и снабдили его всеми необходимыми датчиками.

Для измерения силы тяги и момента были выбраны хорошо распространённые сейчас датчики с тензосопротивлением. Они обладают хорошей жесткостью и высокой точностью измерения и очень удачно подходят по своей конструкции.
Для измерения остальных параметров были выбраны стандартные для этого датчики: полупроводниковое термосопротивление для температуры, акселерометр для замера вибраций, датчик тока на эффекте холла для измерения тока и делитель для напряжения…
Сердцем нашего стенда является микроконтроллер ATMega328 на плате Arduino Nano. Он собирает показания с датчиков, обрабатывает их и выводит на экран. Данный микроконтроллер оптимально подходит для данной задачи. Он обладает минимальной ценой, не привередлив к питанию, стабилен и имеет достаточное количество интерфейсов для данной задачи.
В результате нашей работы был получен стенд со следующими параметрами:
- Питание через BEC модулю контроллера 5-9В, либо через micro USB
- Измерение тяги до 5Кг с точностью +-5г
- Измерение момента до 3Кг/см с точностью +-5г/см
- Измерение напряжения до 30В с точность +-0.2В
- Измерение тока до 30А с точностью +-0.1А
- Измерение КПД с точностью +-2.5%
- Возможность измерения оборотов винта в диапазоне 1000-15000RPM
- Возможность измерения относительных вибраций.(Можно использовать этот параметр для балансировки мотора с винтом путём уменьшения параметра вибраций)
- Измерение температуры мотора (*на данный момент не полностью реализовано в стенде, нами использовался отдельно подключенный датчик)
- Возможность управления педалью “газа” прямо с пульта
Мы испытали наш стенд на распространенном китайском моторе 2212 и на нашем моторе.

Пример испытания на видео
Китайский мотор во всём диапазоне не смог выдать КПД выше 50%, а его эффективность составила около 4-5г/Ватт. Наш же смог показать КПД выше 70%, при этом он работал на минимуме своей мощности(тест был в пике до 500Вт, теоретический максимум 1500Вт), т.к. размер тестируемого винта маловат для него и с большем винтом КПД только возрастёт. Эффективность же у нас получилась 9г/Ватт. Так что даже с учетом гораздо большего веса мотора, даже небольшой коптер с нашим мотором смог бы летать дольше.)
Экономный вариант
Стенд описанный в данной статье является достаточно сложным и предназначен для точной проработки силовых агрегатов дрона. Для случая, когда охото сэкономить и узнать просто тягу мотора, нами был сделан простой, дешевый адаптер способный выполнить данную функцию.

Данный адаптер крепится одним концом к мотору, вторым к бутылке с водой. Бутылка устанавливается на весы. Далее мотор запускается и тяга измеряется по показаниям весов.

Крепление на адаптере сделано универсальным и подходит практически под все распространенные моторы. На втором конце адаптера находится резьба для накручивания на 5ти литровую бутылку.
В этой статье мы подробно расскажем о том, как правильно подобрать двигатель для квадрокоптера. Когда вы покупаете готовый квадрокоптер, вопрос двигателя остается практически последним в списке всевозможных характеристик, на которые стоит обратить внимание. А зря! Ведь двигатель – основа всех основ в квадрокоптере, без него невозможен ни запуск, ни, тем более, сам полёт.
Итак, покупая полностью готовый к использованию квадрокоптер, вы не придаёте значения его двигателю, но что если вы собираете беспилотный аппарат самостоятельно? Мы поможем вам сделать выбор «сердца» для вашего дрона.
Итак, первое, с чем стоит определиться, — это то, на чем ваш квадрокоптер будет летать: на электричестве или бензине. 99% современных моделей квадрокоптеров, продаваемых в России, в качестве источника питания используют литий-полимерные аккумуляторы. А вот оставшийся 1% имеет в своей конструкции двигатель внутреннего сгорания – абсолютно такой же, как в автомобилях, только в сотни раз меньше.
Но сегодня мы поговорим о двигателях, работающих на электричестве. В ходе различных разработок и модификаций производители представили миру три наиболее оптимальных типа:
- Коллекторный
- Коллекторный с редуктором
- Бесколлекторный
То, какой из них вы выберете, будет зависеть исключительно от характеристик будущего дрона.

Так, если вы предполагаете построить своими руками квадрокоптер-мини с простым управлением (что-то вроде ), то смело покупайте коллекторный двигатель. Его использование именно на миниатюрных дронах обуславливает его достаточно малый вес, который практически не утяжелит конструкцию. Отсутствие дополнительных утяжелителей очень важно для дронов, так как меньшая масса обеспечивает меньший расход энергии аккумулятора. К тому же он очень дешевый.
К сожалению, у таких двигателей есть и свои минусы: во-первых, они обеспечивают создание крайне малой воздушной тяги, поэтому высоко на таком движке дрон не улетит. А во-вторых, что более важно, он быстро и сильно греется, а, как известно, высокие температуры для всей системы двигателя губительны. Таким образом, будьте готовы к ремонту в любой момент.
Коллекторный двигатель с редуктором так же имеет низкую стоимость и небольшой вес, но способен приводить в действие модели посерьезнее – среди именитых дронов такой вид движка стоит на Parrot ar drone 2.0. Но в отличие от движка без редуктора этот вид сможет обеспечить достаточную тягу, чтобы квадрокоптер поднимался на десятки метров в высоту.

Но он так же греется, а значит, будет требовать частого ремонта и замены либо части деталей, либо всей системы в целом. Особенно часто вам придется сталкиваться с ремонтом шестерней, так как именно в этом моторе они быстро изнашиваются.
Покупка бесколлекторного мотора обойдется вам гораздо дороже, нежели покупка предыдущих видов. В массовом производстве бесколлекторный мотор можно встретить на моделях, чья цена начинается от 20 тысяч. Высокая цена в случае с этим двигателем означает и высокие показатели качества. Во-первых, он износостойкий – при условии дороговизны его запчастей отсутствие необходимости частого ремонта — явный плюс. Во-вторых, он обеспечивает большую тягу для подъема квадрокоптера.
Но есть у него и минусы – большой вес, который смогут поднять коптеры по размерам не менее средних.
Несмотря на то что квадрокоптеры крайне модная тема, выбирать компоненты для сборки своего аппарата по-прежнему не так просто. Выбор деталей для конкретного проекта - это мучительный поиск оптимального сочетания веса, мощности и функ-циональности. Поэтому прежде, чем окунуться в мир бесчисленных интернет-магазинов и безымянных китайских производителей, давай проделаем подготовительную работу.
Что такое квадрокоптер и для чего это надо
Мультироторы, они же мультикоптеры или просто коптеры, - это беспилотные летательные аппараты, предназначенные для развлечения, съемки фото и видео с воздуха или отработки автоматизированных систем.
Коптеры обычно различают по числу используемых моторов - начиная от бикоптера с двумя моторами (как GunShip из фильма «Аватар») и заканчивая октакоптером с восемью. На самом деле число моторов ограничено только твоей фантазией, бюджетом и возможностями полетного контроллера. Классическим вариантом является квадрокоптер с четырьмя моторами, расположенными на перекрещивающихся лучах. Такую конфигурацию еще в 1920 году попытался соорудить француз Этьен Омишен (Étienne Oehmichen), и в 1922 году у него это даже получилось. По сути, это самый простой и дешевый вариант сделать летательный аппарат, способный без особых проблем поднимать в воздух небольшие камеры вроде GoPro. Но если ты собираешься взлетать с серьезной фото- и видеотехникой, то стоит выбирать коптер с большим числом моторов - это не только увеличит грузоподъемность, но и добавит надежности, если в полете выйдет из строя один или несколько моторов.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит». Даже самолеты в полете имеют какую-то составляющую «сноса», которая уводит их от курсового направления. А вертолеты вообще могут летать боком.
Три эти угла принято называть крен, тангаж и рыскание. Крен - это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж - это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание - поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.
Основные маневры (слева направо): движение по прямой, крен/тангаж и рыскание
В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт. Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два - против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами. Если они все будут вращаться с одинаковой скоростью, то они скомпенсируют друг друга: рыскание, крен и тангаж будут нулевыми.

Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся. А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо. Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса. Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch . Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.
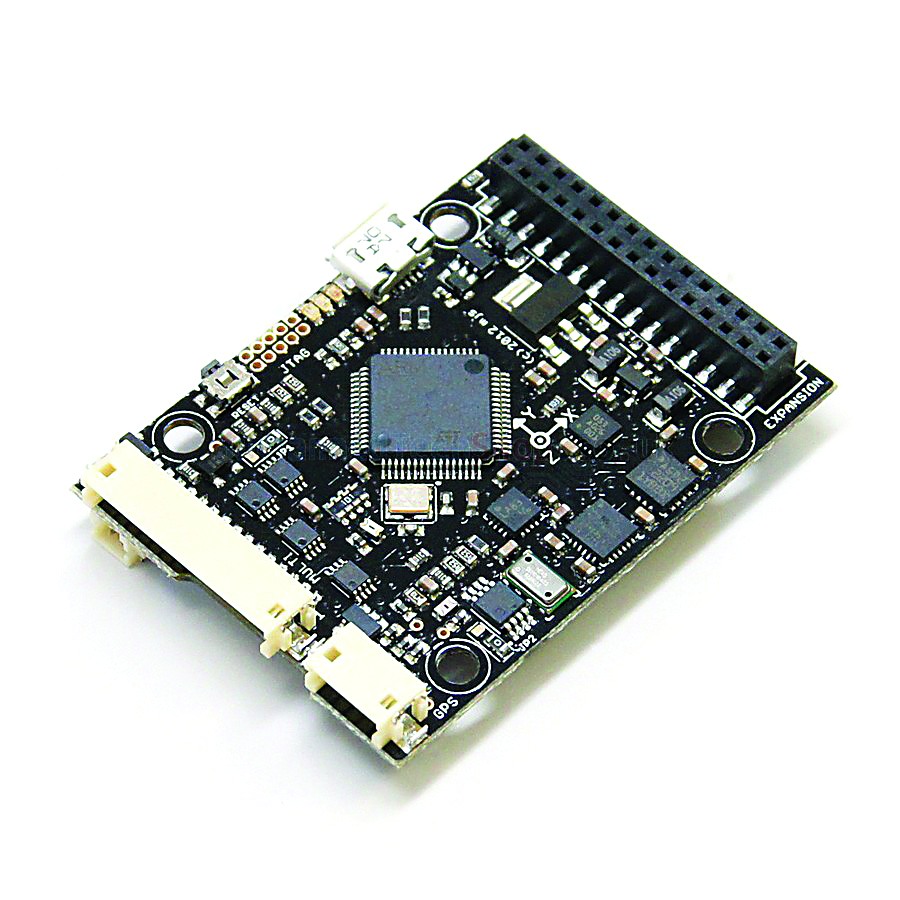 PX4 - бортовой компьютер с полноценной UNIX-системой
PX4 - бортовой компьютер с полноценной UNIX-системой
Рама
Основной момент, который нужно решить при выборе рамы, - будешь ли ты использовать готовую раму или же делать ее сам. С готовой рамой все проще, да и заказывать в любом случае придется множество деталей. При этом, учитывая цены в китайских магазинах, самодельный вариант может оказаться дороже. С другой стороны, собственную раму в случае аварии будет проще починить. Ну и, естественно, своими руками можно сделать любую, даже самую сумасшедшую конструкцию. Рассмотрим поподробнее самосборный вариант.
Сделать раму можно из любых подручных материалов (дерево, алюминий, пластик и так далее). Можно подойти чуть серьезнее и выпилить ее на ЧПУ-станке из плетеного карбона, причем можно усложнить задачу и сделать складную конструкцию.
Самый простой вариант для любителей DIY - пойти в OBI, «Леруа Мерлен» или на строительный рынок и купить квадратную алюминиевую трубу 12 × 12, а также алюминиевый лист толщиной в 1,5 мм. Для того чтобы сделать раму из таких материалов типа «четыре палки и крепеж», достаточно дрели или ножовки по металлу. Но нужно быть готовым к тому, что такая конструкция прослужит недолго. Все-таки все эти профили делают из очень мягкого материала (АД31/АД33), при полетах он будет легко гнуться.
 Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
Oehmichen № 2, пилотируемый квадрокоптер французского инженере Этьена Омишена, запущенный в 1922 году
В качестве образца для твоей рамы можно взять упрощенную заводскую раму или же найти в интернете готовый чертеж. Более сложные материалы (например, углепластик) можно заменить на алюминий - если и получится тяжелее, то ненамного. В любом случае стоит обращать внимание на длину и симметричность лучей. Длина лучей выбирается исходя из диаметра используемых пропеллеров, так, чтобы после их установки расстояние между окружностями вращающихся винтов было не менее 1–2 см, и уж тем более эти окружности не должны пересекаться. Моторы, устанавливаемые на лучах, должны быть равноудалены от центра рамы, где будет располагаться «мозг», и (в большинстве случаев) находиться на одном расстоянии друг от друга, образуя равносторонний многоугольник.
При проектировании стоит учесть, что центр рамы должен совпадать с центром тяжести, поэтому установить аккумулятор сзади между лучами - плохая идея, если он не будет скомпенсирован грузом спереди, например камерой. Продумай, на что будет приземляться твой аппарат, для новичков можно посоветовать приспособить что-то мягкое на «пузе» или концах лучей, например плотный поролон или теннисные мячики. А также защити аккумулятор на случай неудачного приземления, например установи его между пластинами рамы или расположи под высокими посадочными лыжами.
info
Полет от первого лица (FPV) очень захватывает, особенно если пользоваться видео-очками и HeadTracker’ом, который будет повторять движения головы на подвесе FPV-камеры, создавая ощущение, что находишься в кабине пилота.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке. Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.
Регулятор скорости,он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя. Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности. Существуют и пропеллеры с изменяемым шагом, что в теории повысит маневренность, но в реальности добавит сложную механику, имеющую свойство изнашиваться и ломаться с последующим дорогостоящим ремонтом.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.
И наконец, бесколлекторные моторы. У моторов есть ключевой параметр - kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент. Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше - тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
info
Более прочный материал - дюраль (Д16Т). Практически не гнется, достаточно пружинистый, и его применяют в авиации. Профили из него в ОБИ не продаются, но можно поймать на Митинском рынке на третьем этаже, на рынке ТВЦ «Строй» тоже были.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка - это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов. На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус - при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время. Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 10 A = 40 A, а батарея может выдавать 2,2 A 30 = 66 A или 2,2 А 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата. Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке. Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном - емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) - это три последовательно подключенных элемента. Напряжение такой батареи будет 11,1 В. 4S2P - это восемь элементов, две группы, подключенных параллельно по четыре последовательных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении. Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки. Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой. Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module - модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее. Конечно, батарею не надо припаивать, а надо соединить через разъем. Ты же не хочешь перепаивать батарею каждый раз, как она сядет.
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик - начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
Гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); барометр дает возможность удерживать аппарат на определенной высоте. На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет). К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; оптический сенсор от мышки используется для удержания позиции на малых высотах; датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter - проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega. MegaPirateNG - это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.
Продвинутый девяти-канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер - PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 - платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, - пропорциональная составляющая, обозначаемая как P или rateP. Если при взлете твой коптер дергается из стороны в сторону, то это значение надо уменьшать, если же вяло реагирует на внешние воздействия, то наоборот - повышать, остальные нюансы ты сможешь найти в инструкциях и на сайтах разработчиков.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Управление
Немного про радиоаппаратуру. Сейчас практически все передатчики для летающих моделей работают на частоте 2,4 ГГц. Они достаточно дальнобойные, и этот частотный диапазон не так зашумлен, как, например, 900 МГц. Для полета вообще-то достаточно четырех каналов: газ, рыскание, тангаж, крен. Ну а восьми каналов точно хватит и на что-нибудь еще.
info
Для полетов с камерой обзаведись подвесом, который будет удерживать камеру параллельно горизонту при маневрах, а также поможет управлять наклоном камеры. Большинство контроллеров имеют выходы для стабилизации подвесов с сервоприводом, а также выход для переключателя управления кнопкой спуска камеры.
Комплект обычно состоит из самого пульта и приемника. На приемнике находятся ручки управления и дополнительные кнопки. Обычно выбирают аппаратуру Mode2, когда левый стик управляет газом и поворотом, а правый - наклонами коптера. Все ручки, кроме газа, подпружинены и возвращаются в начальное положение при отпускании. Также стоит обращать внимание на количество каналов. Для беспилотника потребуется четыре канала управления и один канал для переключения режимов полета, кроме того, могут потребоваться дополнительные каналы для управления камерой, для настройки или для особых режимов полетного контроллера. При выборе пульта стоит также учитывать возможность смены радиомодуля, чтобы в будущем его можно было легко обновить.